位置探测器(PSD)性能参数详解
参数介绍psd
|
以下是PSD的彩页参数及常见参数解释,包括参数定义和相关解析。

表1 PSD参数表
|
|
1、光谱响应范围的短波下限取决于窗材透过率,长波上限取决于本征材料特性;
2、环氧树脂涂料(Epoxy coating)易吸收短波成分,对于波长320 nm以下有探测需求的,选择有机硅涂料(Silicone coating);
3、硅在常温下的带隙能为1.24 eV λc = 1240(eV)/Eg (nm),Eg:带隙能。因此,长波截止约在1100 nm附近。
|
|
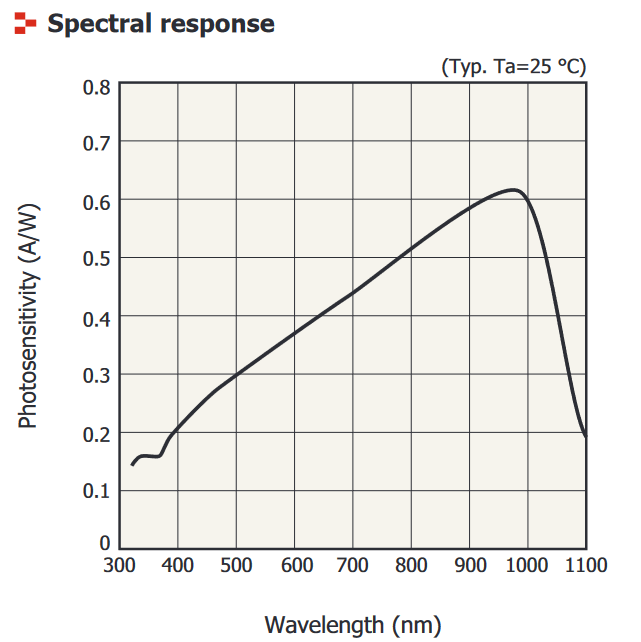
图1 光谱响应曲线
|
|
光谱响应中,灵敏度最大值所在的波长。一般来讲选择与待测光波段附近的峰值灵敏度波长,信号输出更大。
|
|
光灵敏度(单位:A/W)为光电流(单位:A)与特定波长入射光辐射能通量(单位:W)的比值。当入射光为峰值波长时,光灵敏度为0.6 A/W。
|
|
1、极间电阻指的是阳极pin1和阳极pin2之间的电阻,也叫位置电阻(positioning resistance),它是在电压为0.1 V的条件下测得;
2、分流电阻指的是阳极pin1或阳极pin2与阴极pin3之间的电阻。
|
|
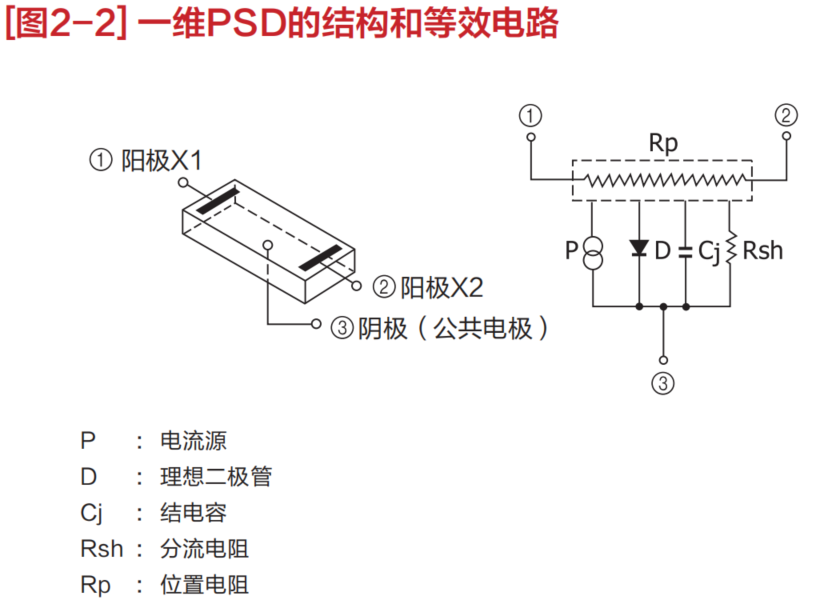
图2 一维PSD的结构与等效电路
|
|
1、通过计算的光斑位置通常和真实入射位置存在误差:
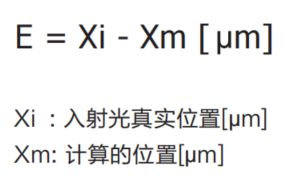
图3 误差公式
以S5990-01为例,位置探测误差典型值70 um,测量条件为,入射波长900 nm,反向偏压5 V,光斑直径0.2 mm以上,该误差测量值在光敏面的80%的圆内获取。
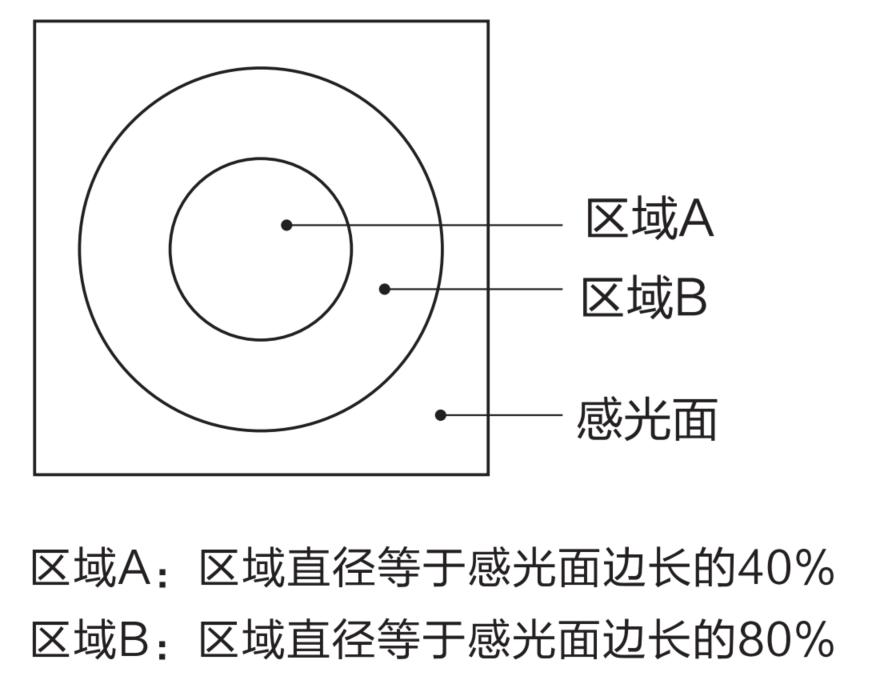
图4 光敏面示意图
3、位置探测误差会随着光斑中心到电气中心的距离而变化,距离越远,误差越大。以二维PSD模块C10443-01为例,光斑中心距离电气中心左右1.5 mm时,位置探测误差约85 um。
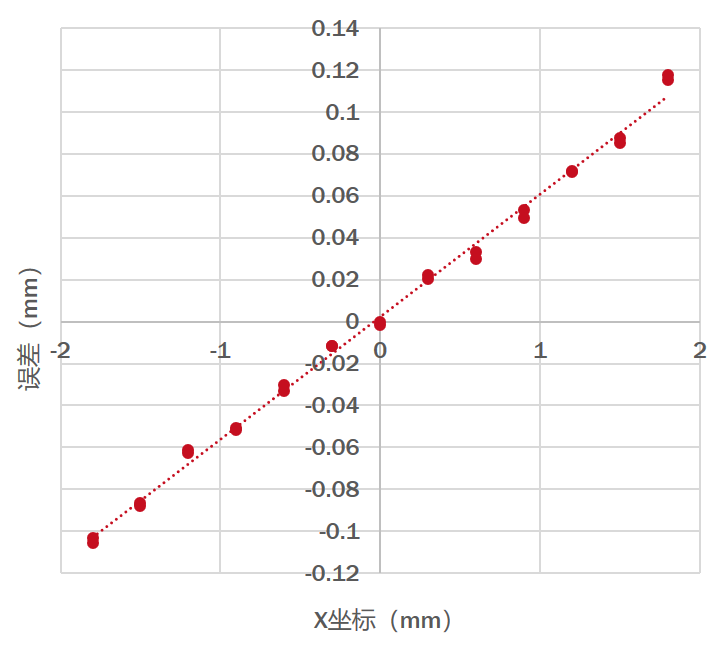
图5 误差拟合线
位置探测误差同距离有一定的线性关系,可以通过线性拟合标定的方式进行PSD探测误差的消除。
|
|
1、饱和光电流是指整个感光面被照射时所测量的全部光电流;
2、在背景光很强的室外或者信号光很强的情况下使用PSD时,必须考虑光电流饱和。饱和PSD的输出导致线性度偏离,PSD将无法正常工作;
3、为了避免光电流饱和,可采用以下措施:
①使用滤光片,降低背景光强;②使用感光面小的PSD;③提高反向电压;④降低电极间电阻;⑤增大光斑尺寸。
|
|
1、当电路中加上了反向电压(VR)时,会一直有电流通过PSD,这个电流甚至在PSD不感光时也依然存在,所以称之为暗电流;
2、影响暗电流大小的有两个因素,一个是反向电压,一个是温度;
3、但暗电流本身不是噪声,暗电流的不确定性(其实就是来自暗电流的散粒噪声)才是噪声。举个具体的例子,假设暗电流为100 pA,实际的暗电流则是会在100 pA左右波动,这一时刻可能是97 pA,下一时刻又变成101 pA,这个不确定性的绝对量会随着暗电流的变大而变大,所以暗电流越大,噪声就越大。
|
|
1、和光电二极管一样,PSD的响应速度是指产生的载流子作为电流输出到外部电路的时间,通常用上升时间/截止频率表示,是在探测快速移动的光斑或者为了减除背景光而使用脉冲驱动型信号光源时的重要参数;
2、上升时间定义为输出信号从峰值的10%上升到90%所需要的时间;
3、当PSD接收到激光二极管等发射的正弦调制光波时,其截止频率fc定义为PSD的输出(电流或电压)相比于100%输出下降3 dB时的频率。截止频率(fc)与上升时间(tr)的换算公式为:tr(ns)=0.35 / fc(GHz)。
|
|
由于耗尽层的存在,PSD的PN结中会形成一个等效电容,称作结电容(Cj)。终端电容(Ct)包含了结电容(Cj)和封装时所产生的寄生电容(package stray capacitance),是一个更加实用的数据。一般说来,终端电容(Ct)越大,响应速度越慢——通俗地理解,电容大了,充放电时间变长,最终影响PSD输出信号的时效性。
|
|
1、位置分辨率即可探测的最小光斑位移。分辨率数值与PSD的长度和测量系统的带宽成正比,与PSD的光电流成反比;
2、以二维PSD模块C10443-01为例,位置分辨率为0.3 um。
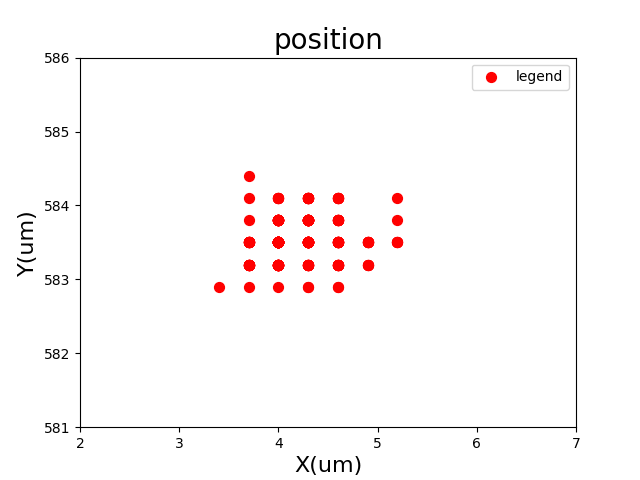
图6 位置分辨图
|