激光测距技术简介及滨松光电探测解决方案
|
激光测距(Laser ranging)是最早在军事上得到运用的激光技术,并且已经成为国防科研的重要课题之一。同时,激光测距也是激光测速、激光跟踪、激光三维成像、激光雷达等高端技术的前提。
世界上第一台激光器,是由美国休斯飞机(Hughes Aircraft)公司的科学家梅曼于1960年首先研制成功的,美国军方很快就在此基础上开展了对军用激光装置的研究。1961年,第一台军用激光测距仪通过了美国军方论证试验,此后激光测距仪很快就进入了实用环境中。20世纪七十年代,美国军方的阿波罗计划中,曾经使用激光测距技术测量地球与月球的距离,接收端使用的是雪崩光电二极管(APD)单光子探测器。
根据基本原理,实现激光测距的方法有两大类:飞行时间(time of flight,TOF)测距和非飞行时间测距。其中,具体的常用方法有脉冲式激光测距法、三角激光测距法和相位式激光测距法。
|
|
脉冲式测距是激光技术最早应用于测绘领域中的一种测量方式。由于激光发散角小,激光脉冲持续时间极短,瞬时功率极大可达兆瓦以上,因而可以达到极远的测程。一般情况下不使用合作目标,而是利用被测目标对光信号的漫反射来测距。测量距离可表示为:
|
|
式中D为所测量的距离,c为光在空气中传播的速度,Δt为光波信号在测距仪与目标往返的时间。
|
|
一般在非精密测量中,光在空气中的传播速度取真空中的3×108m/s(现代物理学通过对光频率和波长的测量导出的精确值为2.99792458×108 m/s),若在精密测量中可参考空气的状态进行修正得到精确值。所以只要测得Δt的值就可以得到距离D。
脉冲激光的发射角小,能量在空间相对集中,瞬时功率大,利用这些特性可制成各种中远距离激光测距仪、激光雷达等。目前,脉冲式激光测距广泛应用在地形地貌测量、地质勘探、工程施工测量、飞行器高度测量、人造地球卫星相关测距、天体之间距离测量等方面。
另外,脉冲测距方法也可通过与其他手段结合,更好的提高测量范围和测距精度,如:脉冲测距法与TCSPC技术相结合、脉冲啁啾调制、多频率脉冲测距等。
|
|
相位式激光测距通常适应于中短距离的测量,测量精度可达毫米、微米级,也是目前测距精度最高的一种方式,大部分短程测距仪都采用这种工作方式。
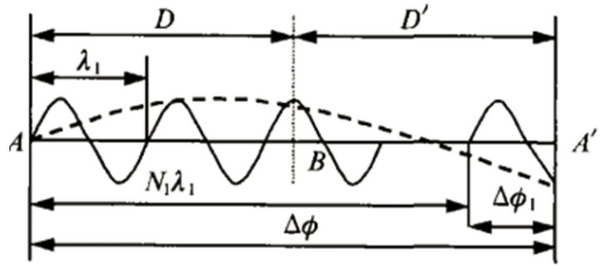
相位式测距则是将一调制信号对发射光波的光强进行调制,通过测量相位差来间接测量时间,较直接测量往返时间的处理难度降低了许多。
|
|
式中—信号往返测距仪与目标之间一次所产生相位差为φ,λ为调制信号的波长。
式中的λ/2称为测尺,即当相位变化为2π时所对应的距离。可以看出当选择的调制频率不同时,所能测到的最大距离是不同的。
在实际的单一频率测量中,只能分辨出不足2π的部分而无法得到超过一个周期的测距值。对于采用单一调制频率的测距仪,当选择调制信号的频率为100KHz时,所对应的测尺就为1500m,也即当测量的实际距离值在1500m之内时,得到的结果就是正确的,而当测量距离大于即比测尺大时,所测得的结果只会在1500m之内,此时就出现了错误。
所以,在测量时需要根据最大测程来选择调制频率。当所设计的系统测相分辨率一定时,选择的测尺越小,所得到的距离分辨率越高,测量精度也越高。即在单一测尺的情况下,大测程与高精度是不能同时满足的。
|
|
三角测距法即光源、被测物面、光接收系统三点共同构成一个三角形光路,由激光器发出的光线,经过汇聚透镜聚焦后入射到被测物体表面上,光接收系统接收来自入射点处的散射光,并将其成像在光电位置探测器敏感面上,通过光点在成像面上的位移来测量被测物面移动距离的一种测量方法。
|

|
激光三角测距法具有结构简单、测试速度快、使用灵活方便等诸多优点,但由于激光三角测距系统中,光接收器件接收的是待测目标面的散射光,所以对器件灵敏度要求很高。另外,如激光亮度高、单色性好、方向性强,在近距离的测量中较为容易测量出光斑的位置。因此三角法应用范围主要是微位移的测量,测量范围主要在微米、毫米、厘米数量级,已经研发的具有相应功能的测距仪,广泛应用于物体表面轮廓、宽度、厚度等量值的测量,例如汽车工业中车身模型曲面设计等。
|
|
适用于激光测距的半导体光电探测器主要有以下几种常见器件:
|

1)激光光源
|
测距时所采用的光源大都是近在红外波段,因此采用的光源大都为870nm和905nm的脉冲或激光器。
|
2)Hybrid device
|
Hybrid device将APD与TIA(跨阻放大器)集成到一起,保证了高频率要求下的小型集成化需要,也是半导体集成化器件的发展方向。而光源主要是适应不同应用的环境的激光光源产品。
|
3)距离传感器
|
距离传感器(Distance sensor)是基于CMOS技术的新型测距器件,利用调制后的激光脉冲的脉宽确定最大量程,且通过一定时间的回波光电荷积累,该器件可以用相位测距的方法得到很高的测距精度,是一种新型的测距器件。线阵的距离传感器可以同时测得一行目标的距离信息,而面阵的距离传感器可以直接得到整个目标面的距离。这种新型器件在无人驾驶、机器人等需要近距离测距定位等应用方面有很高的使用价值。
|
4)MPPC(SiPM)
|
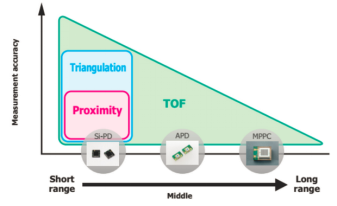
我们在选择探测器时,高增益、大动态范围以及快速时间响应为我们需要考虑的重要因素。APD与MPPC(硅光电倍增管,SiPM)的高增益决定了他们适合于中远距离的测距用途,表面贴装形式也可以更好的降低器件的成本。
同时MPPC具有更大的动态范围,其中拥有小有效面积、多像素的MPPC结构有则更为凸显,不仅可以对入射光子数进行分辨,同时也有较快的时间特性。MPPC用于测距,既可以利用它低工作电压下即可达到的高增益特性,也可以利用它独有的光子分辨能力,将不同表面反射率的物体识别出来,从而达到测距同时分辨物体表面特性的目的。
上文介绍的三种测距方法所使用到的探测器、光源既有不同,又有交叠。但相信MPPC(硅光电倍增管,SiPM)的出现,会将中远距离测距推到一个新的高度。
|
|
*以上所涉及元器件产品,均为滨松公司的光电元器件产品。
详细资料请参考以下文件:距离测量应用中的光电器件
|